
Open Access – Statement
Scientific and professional articles in the journal Ventil are published in open access under the CC-BY-4.0 license. Authors are not charged for publishing the article.

The Use of Artificial Intelligence for End-of-Line Quality Control of Electric Motors
The paper presents modern approaches to end-of-line (EoL) quality inspection, i.e. the final inspection stage in the manufacturing process of electric motors, based on artificial intelligence. Traditional EoL systems rely on extensive signal processing and expert-defined features and thresholds…

Development of a digital twin of a progressive mechatronic stamping tool
In modern industrial production, there is a tendency to optimize manufacturing processes, with a special emphasis on reducing energy consumption and waste and maximizing manufacturing flexibility. In forming processes, customers’ need to narrow manufacturing tolerances increases production complexity…

Support with digital twins to enhance sustainability in assembly systems
This study presents an extended approach to digital twins for improving sustainability and efficiency in assembly systems. As part of the development, two digital twins were developed for a pallet circular production line with three workstations.

Comparison of advanced 3d scanning technologies for quality control
3D scanning is a non-contact technology that can convert a physical object into a digital model, enabling the industry to perform reverse engineering and quality control (checking compliance with regulations). Advanced technologies such as 3D scanning are often used in quality control.

Uniforest Connect – digitalization in forestry technology
Users of modern machines and equipment, both at home and at work, expect the ability to monitormachine operating parameters on mobile devices. This allows for easy insight into the machine’s status, monitoring of working capacity, fast diagnostics and remote service, warning of potential problems and preventive maintenance. The goal of the project is to provide users of forestry machines with a very simple insight into the machine’s operation.

Upfront simulations and (their) democratization
Upfront simulation is a term to describe simulation activities being performed early in the design stage. So before physical prototypes are made or full systems being built. The goal is to identify potential issues, optimize designs and predict performance as early as possible, when changes are cheaper and easier to make.

Mehatronic Prototypes for Engineering Education: Bridging Theory and Practice
This article presents five innovative mechatronic prototypes developed as educational tools to enhance engineering education by bridging theoretical concepts with practical implementation. The systems are organized into two thematic sections.

Numerical optimisation of internal geometry structures of AM made hydraulic manifolds
The article presents the use of the Gradient Adjoint Method for numerical optimization of internal channels in hydraulic manifolds manufactured using additive manufactuirng. Traditional design methods are often limiting the geometry due to machining and support structure requirements. Additive manufacturing enables complex geometries; however, for components with internal fluid flow, it is still necessary to consider the constraints of additive manufacturing processes and self-supporting conditions.
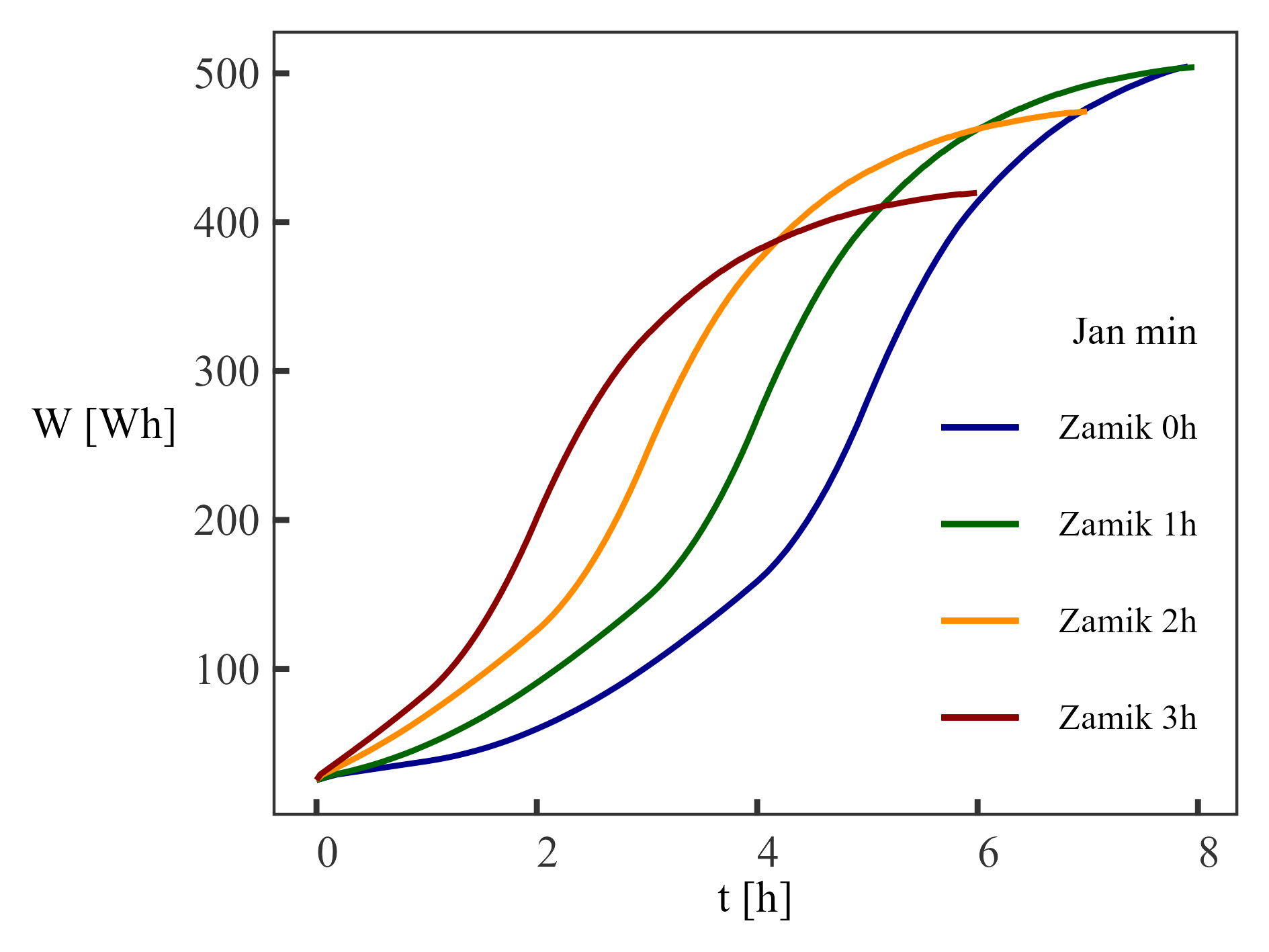
Operational capacity of automated agricultural land processing under variable solar energy availability across different time periods
Sustainable cultivation of urban agricultural areas in the future can be achieved by using automated fleets of processing robots that will be able to adapt their activities to the availability of solar energy. Since this energy source varies depending on the season, it is crucial to consider several factors when designing power systems and algorithms for robot operation.
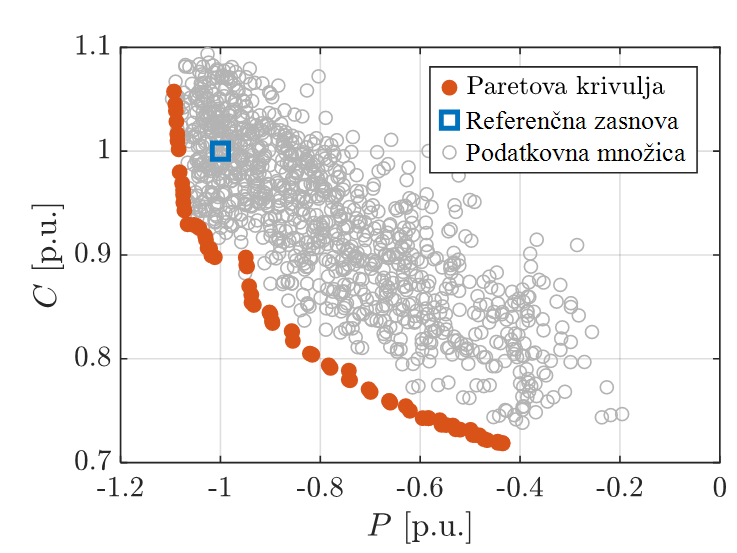
Methodological Approach to Multi-Objective Optimization of Electrical Machines with a Practical Case Study
This paper introduces a structured approach to the multi-objective optimization of electrical machines. The process covers the key steps: defining the problem, identifying the most relevant key performance indicators and constraints, setting the design space, formulating objective functions, and then modeling and evaluating the results.